Мост и дальше: ИИ и дополненная реальность меняют процесс принятия решений в сфере морского судоходства

Системы Furuno могут накладывать графическую виртуальную форму на цели AIS, такие как буи, лодки и корабли, чтобы предоставить подробную информацию об их местоположении в условиях плохой видимости. Изображение предоставлено Furuno

«Один из наиболее вероятных сценариев в ближайшем будущем заключается в том, что человеческий экипаж на борту судов будет дополнен как машинным обучением, так и визуализацией ситуации на судне с берегового объекта». Мэтт Вуд, национальный менеджер по продажам Furuno USA Inc.
 и экранного интерфейса дополненной реальности (справа). Рендеринг Джона Фауске, авторские права принадлежат Школе архитектуры и дизайна Осло. Изображение предоставлено Кьетилом Нордби")
Рендеринг интерфейсов дополненной реальности, крепящихся на голове (слева) и экранного интерфейса дополненной реальности (справа). Рендеринг Джона Фауске, авторские права принадлежат Школе архитектуры и дизайна Осло. Изображение предоставлено Кьетилом Нордби

Рендеринг того, как меняется наложение AR, когда корабль заходит в порт. Рендер Джона Фауске, авторские права принадлежат Школе архитектуры и дизайна Осло. Изображение предоставлено Кьетилом Нордби

Shipin Systems использует систему камер на основе искусственного интеллекта, размещенную в основных рабочих зонах по всему судну. Изображение предоставлено ShipIn Systems Inc.
Интеллектуальная поддержка принятия решений на мостике возможна уже сейчас: благодаря технологии Furuno на видеоизображение передней части судна в реальном времени накладывается навигационная информация, включая курс, данные AIS, данные радиолокационного отслеживания целей, идентификацию объектов, путевые точки маршрута и информацию о карте.
Система поддержки мостика SEA.AI может распознавать крупные суда, не оснащенные АИС, на расстоянии до 7,5 километров (почти пять миль), мелкие суда — на расстоянии до 3 километров (почти 2 мили), а плавающие обломки — на расстоянии до 700 метров (почти полмили).
Расширение ситуационной осведомленности вахтенного с помощью технологий может снизить утомляемость и помочь ему принимать более обоснованные решения раньше. Но нелегко расширить навыки опытного вахтенного. Много усилий уходит на создание базы знаний, которая поддерживает цифровую интерпретацию информации.
Один из наиболее частых запросов, которые получает SEA.AI, касается способности его системы обнаруживать полупогруженные контейнеры. Обнаружение плавающего контейнера в основном не вызывает затруднений из-за его большего размера по сравнению с буями, его жесткой прямоугольной структуры и разницы температур между контейнером и окружающей водой. Однако любой объект может демонстрировать значительные изменения в зависимости от угла обзора, расстояния, состояния моря, уровня погружения, ориентации в воде, времени суток, погодных условий, интенсивности солнечного света, пространственной ориентации и наклона, а также других переменных. В результате для уверенной идентификации объекта SEA.AI часто требуются входные данные из сотен тысяч изображений.
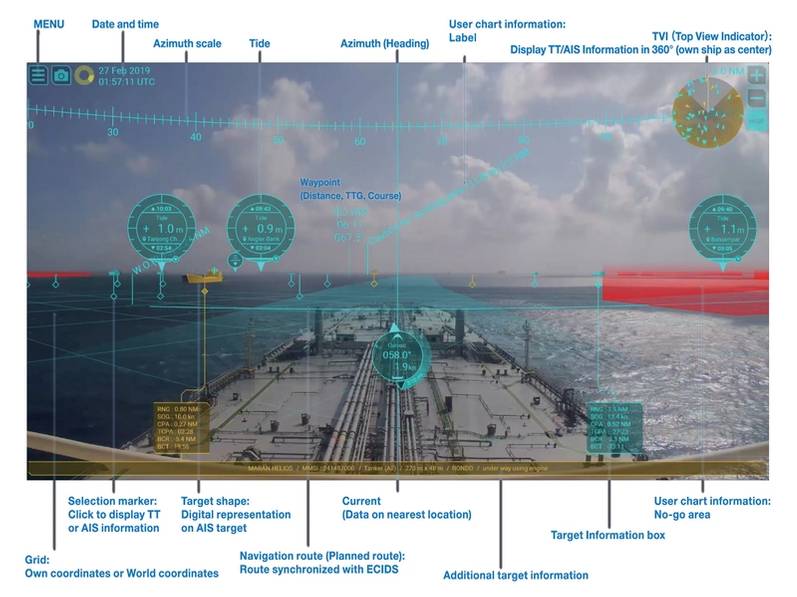 Системы Furuno могут накладывать графическую виртуальную форму на цели AIS, такие как буи, лодки и корабли, чтобы предоставить подробную информацию об их местоположении в условиях плохой видимости. Изображение предоставлено Furuno
Системы Furuno могут накладывать графическую виртуальную форму на цели AIS, такие как буи, лодки и корабли, чтобы предоставить подробную информацию об их местоположении в условиях плохой видимости. Изображение предоставлено Furuno
Технологическая компания Orca AI оценила выгоды от использования цифровой поддержки для избежания резких маневров и отклонений от маршрута. Один из клиентов, Seaspan Corp , зафиксировал 19%-ное сокращение близких столкновений и 20%-ное увеличение минимального среднего расстояния до других судов, что привело к предполагаемой годовой экономии топлива в размере 100 000 долларов США на судно с использованием навигационного помощника Orca AI.
Генеральный директор Shipin Systems Ошер Перри заявляет об эксплуатационных результатах, включая сокращение инцидентов на 42% и увеличение соответствия требованиям на мостике на 17%, когда его система камер на основе искусственного интеллекта размещается в основных рабочих зонах по всему судну. Система обеспечивает обнаружение рисков в реальном времени, включая раннее обнаружение пожаров, безлюдного мостика и ненадлежащего использования СИЗ, путем интеграции видеоданных с судовыми системами, включая навигационные, погодные и машинные датчики. Некоторые суда сообщили об отсутствии инцидентов в течение 180 дней с момента развертывания, в то время как улучшенное техническое обслуживание и раннее обнаружение аномалий сократили незапланированные дни вне лизинга на 30%.
Furuno использует ИИ для дополнения своих систем, которые уже могут накладывать графическую виртуальную форму на цели AIS, такие как буи, лодки и корабли, чтобы предоставить подробную информацию об их местоположении в условиях плохой видимости. В настоящее время компания разрабатывает автоматическую или вспомогательную систему стыковки.
Кроме того, говорит Мэтт Вуд, национальный менеджер по продажам Furuno USA Inc. , компания приняла участие в нескольких полупилотируемых и автономных рейсах в пределах Японии. «Один из наиболее вероятных сценариев в ближайшем будущем заключается в том, что человеческий экипаж на борту судов будет дополнен как машинным обучением, так и визуализацией ситуации на судне с берегового объекта».
Он продолжает: «Сейчас мы находимся на этапе развития дополненной реальности, когда создается множество инструментов, многие из которых хороши. Однако в этих отображениях нет стандартизации. Мы не можем и не должны исключать моряка из уравнения, но нам нужен способ предоставить ему наилучшую возможную информацию максимально простым для распознавания способом».
Furuno участвует в проекте OpenBridge, возглавляемом Школой архитектуры и дизайна Осло, в партнерстве с широким кругом других компаний, включая Kongsberg, Brunvoll и Vard. Вместе они разработали набор инструментов и подходов для улучшения проектирования мостов на основе современных технологий пользовательского интерфейса и принципов проектирования, ориентированных на человека. Цель состоит в том, чтобы избежать фрагментации, которая возникает из-за множества различных пользовательских интерфейсов на мосту, увеличивая необходимость в обучении, а также увеличивая вероятность человеческой ошибки.
 До сих пор большинство демонстраций технологий проекта OpenAR были сосредоточены на поддержке ситуационной осведомленности с помощью систем отображения точек интереса, показывающих суда и другую информацию в реальном мире.
До сих пор большинство демонстраций технологий проекта OpenAR были сосредоточены на поддержке ситуационной осведомленности с помощью систем отображения точек интереса, показывающих суда и другую информацию в реальном мире.
-- Профессор Кьетил Нордби , Школа архитектуры и дизайна Осло .
Изображение предоставлено Кьетилем Нордби  Рендеринг наложения дополненной реальности на крыло мостика с использованием надеваемого на голову интерфейса дополненной реальности. Рендеринг выполнен Йоном Фауске, авторские права принадлежат Школе архитектуры и дизайна Осло. Изображение предоставлено Кьетилом Нордби Более 1000 компаний уже зарегистрировались для доступа к рекомендациям, а успех OpenBridge привел к проекту OpenAR , который расширяет рекомендации до функциональности дополненной реальности. Большинство технологических демонстраций проекта до сих пор были сосредоточены на поддержке ситуационной осведомленности с помощью систем отображения точек интереса, показывающих суда и другую информацию поверх реального мира, говорит профессор Кьетил Нордби из Школы архитектуры и дизайна Осло. «Теперь они сделаны для видео в удаленных операционных центрах, интерфейсов с проекцией в окна, систем ситуационной осведомленности на судах и дисплеев на лобовом стекле, похожих на автомобильные системы. Мы пока не видели ни одного партнера, который бы делал системы, монтируемые на голове, но мы ожидаем, что это тоже не за горами».
Рендеринг наложения дополненной реальности на крыло мостика с использованием надеваемого на голову интерфейса дополненной реальности. Рендеринг выполнен Йоном Фауске, авторские права принадлежат Школе архитектуры и дизайна Осло. Изображение предоставлено Кьетилом Нордби Более 1000 компаний уже зарегистрировались для доступа к рекомендациям, а успех OpenBridge привел к проекту OpenAR , который расширяет рекомендации до функциональности дополненной реальности. Большинство технологических демонстраций проекта до сих пор были сосредоточены на поддержке ситуационной осведомленности с помощью систем отображения точек интереса, показывающих суда и другую информацию поверх реального мира, говорит профессор Кьетил Нордби из Школы архитектуры и дизайна Осло. «Теперь они сделаны для видео в удаленных операционных центрах, интерфейсов с проекцией в окна, систем ситуационной осведомленности на судах и дисплеев на лобовом стекле, похожих на автомобильные системы. Мы пока не видели ни одного партнера, который бы делал системы, монтируемые на голове, но мы ожидаем, что это тоже не за горами».
Его внимание к дизайну рабочего места распространяется на машинные отделения, и совсем недавно, в проекте OpenZero, он охватывает технологии декарбонизации, которые повышают энергоэффективность и снижают расход топлива. Партнерами этого проекта являются ABB, GE Marine и DNV.
Все эти проекты предназначены для поддержки принятия решений экипажами, но разрабатываемые системы также являются строительными блоками для безопасной навигации и управления автономными судами. Для этого необходимо расширить принятие решений машинами.
«Прогнозирование пешеходов и других транспортных средств или судов является одним из наиболее финансируемых направлений исследований в области автономной навигации в наземных, воздушных или морских системах», — говорит профессор Локукалуге Прасад Перера из Арктического университета Норвегии . Перера тестирует модели для прогнозирования поведения судов на больших и малых расстояниях с использованием нейронных сетей, которые могут обучаться на основе обширных баз данных, таких как те, которые созданы на учебных симуляторах, а также на основе данных бортовых датчиков и AIS. Цель состоит в том, чтобы обеспечить безопасное принятие решений на автономных судах и помочь экипажам понять поведение автономных судов, если они с ними столкнутся.
Команда Переры работает над крупномасштабным предиктором, который объединяет обучение нейронной сети с данными AIS для прогнозирования траектории судна на срок до 20 минут. Также разрабатывается локальный предиктор, который объединяет кинематические модели судна и обучение нейронной сети на основе данных о производительности судна на борту для точного прогнозирования траектории судна на ближайшие 20 секунд.
«Локальный предиктор важен для многих ситуаций близкого столкновения судов, чтобы оценить возможный риск столкновения. Поэтому как локальные, так и глобальные предикторы могут помочь автономным судам обнаружить возможные ситуации столкновения, а затем предпринять соответствующие действия на ранней стадии», — говорит Перера. «Когда системы принимают решения, эти ранние прогнозы чрезвычайно важны».
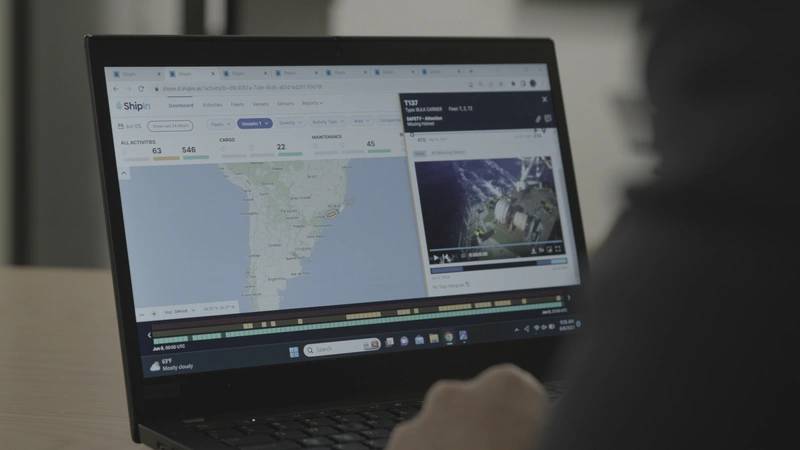 Shipin Systems предлагает обнаружение рисков в режиме реального времени, включая раннее обнаружение пожаров, беспилотный мостик и неправильное использование СИЗ. Авторские права на изображение 2024, предоставлены ShipIn Systems Inc.
Shipin Systems предлагает обнаружение рисков в режиме реального времени, включая раннее обнаружение пожаров, беспилотный мостик и неправильное использование СИЗ. Авторские права на изображение 2024, предоставлены ShipIn Systems Inc.
Горящий автомобильный перевозчик, брошенный у берегов Аляски

ABS, Herbert Engineering Report подробно описывает проектные решения для плавучих центров обработки данных

Сокращения Трампа угрожают безопасности рыболовства

Количество брошенных моряков в 2025 году может превзойти рекорд 2024 года

Крупнейшее японское круизное судно завершило свою первую морскую бункеровку СПГ
-160589 "(Источник: Сингапурский круизный центр)")
Мнение: Закон США «Корабли для Америки»… в закупоренной бутылке

Поскольку судно тонет у берегов Индии, продолжается гонка по локализации разлива нефти

Грузовое судно врезалось в сад перед норвежским домом

Соберите сейчас, расшифруйте позже

Один человек пропал без вести после пожара на глубоководной платформе Chevron у берегов Анголы
-160345 "Платформа BBLT (Кредит: ANPG)")
Хотите спасти планету? Меняйте лампочки на кораблях, поддерживайте чистоту корпуса

Обновление: мексиканское судно не подавало сигналов бедствия перед тем, как врезаться в Бруклинский мост
